THE PRESENT
WHAT WE DO
Technologies of urban Maglev
Levitation
When powered, the train’s levitation electromagnets generate electromagnetic force to attract the rail, and this force makes the maglev trainfloat over the rail. Gap sensors measure the air gap between the electromagnet and the rail and provide the signal to the levitation controller,which controls the current supply to the magnets to maintain the air gap of 8mm.
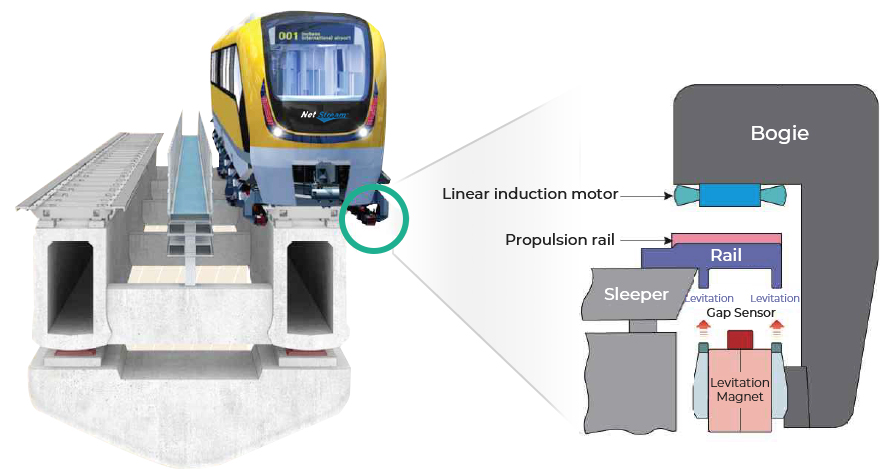
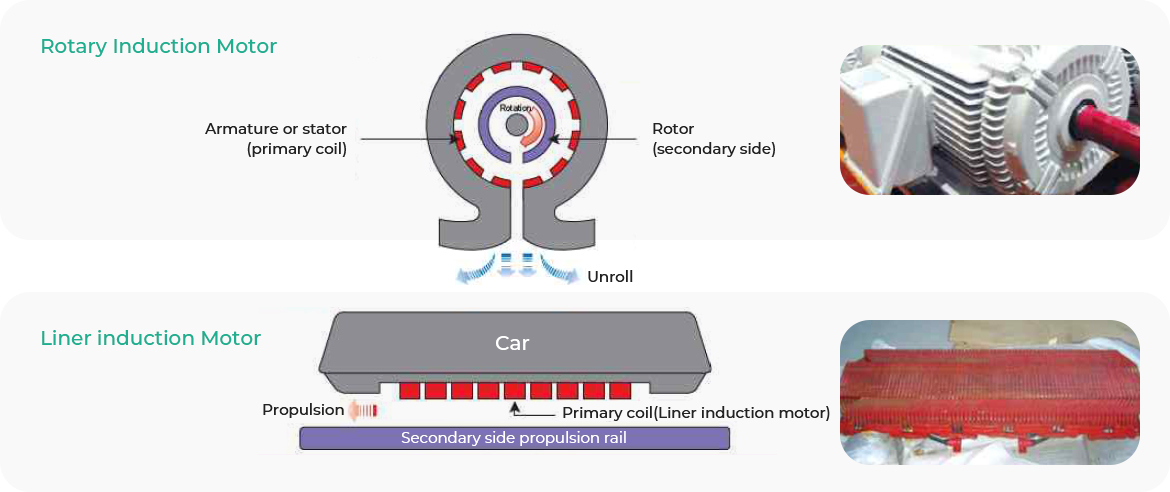
Propulsion
The Urban Maglev uses a linear induction motor instead of conventional rotating motors, thus enabling linear motion. The 3-phase AC powersupplied to the linear motor induces electric current in the propulsion rail made of aluminum, which generates propulsion force byelectromagnetically interacting with the motor current. The train’s running speed is controlled by varying the frequency of the inputcurrent to the motor.